Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
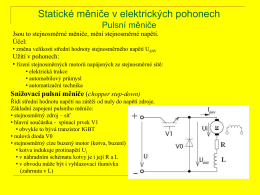
Frekvenční měniče - Ing. Pavel Kobrle
Tutaj prezentacja pdf sterowania Altherma serii CA
t - Ing. Pavel Kobrle
Okruhy E4A maturita pro studenty 2014.pdf
PR2 BLDC motory a SMPM
ag40l pdf indir
Komutátorové stroje
14 JISTENI-new1
Stáhnout Česky
SINAMICS V20
Elektrické pohony a výkonová elektronika
Číslo 3 - Červenec (Ke stažení)
1 Začínáme s programem MS Word
XXII. Církevně náboženské poměry ve dvacetiletí mezi dvěma
Pravda o mléce
CZ - Remak a.s.
SINAMICS drives Okruh expertů… … pro všechna
Nástřešní větrací jednotky DVJ-450
AG40/60/80 L
Závady U 60
Děti ve Frenštátě oslavily svůj svátek v indiánské vesnici
software asp asp - ATOS spol. s ro
Kmitavý pohyb a jeho modelování metodou „od oka“