Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
t - Ing. Pavel Kobrle
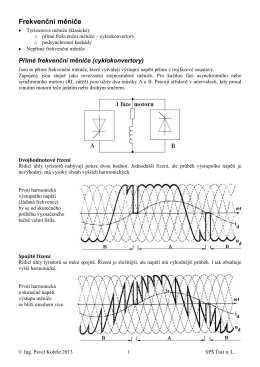
Frekvenční měniče - Ing. Pavel Kobrle
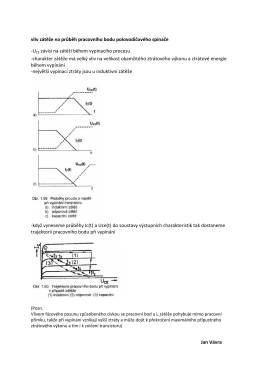
Jan Vávra vliv zátěže na průběh pracovního bodu polovodičového
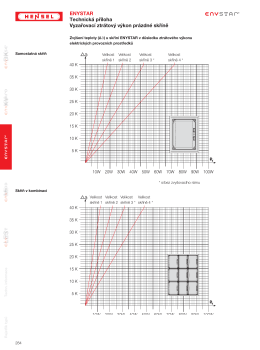
vyzářitelný ztrátový výkon
Elektrické stroje a pohony (NP006, NK006)
Elektrické stroje (PB107, KB 107)
Nezávislý železničný portál ŽelPage prekonal hranicu 20 miliónov
Danfoss VLT Drives Přehled výrobků
Montážní návod panel RODECA 40mm - TITAN
Stáhnout Česky
K624i 6-24x56
edukační záznam ii.
Okruhy E4A maturita pro studenty 2014.pdf
Práce
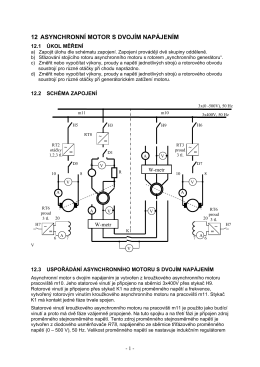
12 ASYNCHRONNÍ MOTOR S DVOJÍM NAPÁJENÍM
Pracovní sešit II. ročník
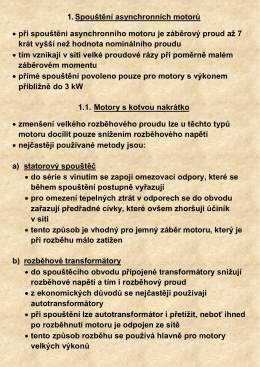
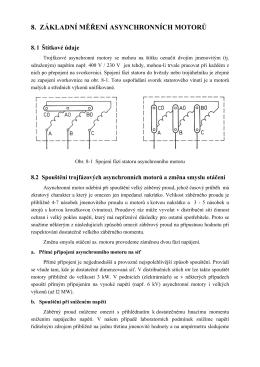
1. Spouštění asynchronních motorů • při spouštěni asynchronního
1 - HONDA
Untitled
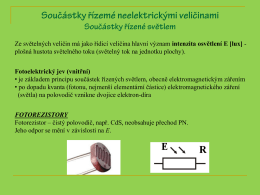
Elektronické součástky a obvody
Generátory - Real Stroj
DCIxWMS - AIMTEC a.s.
8. ZÁKLADNÍ MĚŘENÍ ASYNCHRONNÍCH MOTORŮ