Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Elektrické stroje a pohony (NP006, NK006)
Elektrické stroje (PB107, KB 107)
L - frengp.cz
Příklady z elektrotechniky a elektroniky – 1
Příloha č. 4_Technická specifikace.pdf
1070.81_064
Synchronní stroje
MONTÁŽNÍ NÁVODMONTÁŽNÍ NÁVOD
t - Ing. Pavel Kobrle
Pracovní sešit II. ročník
UF-I30
Prospekt MANUALplus 620
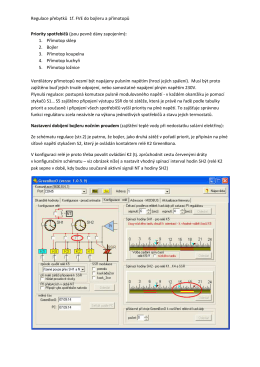
Regulace přebytků 1f. FVE do bojleru a přímotopů Priority
Mechanické vlastnosti PL
Bin. relace
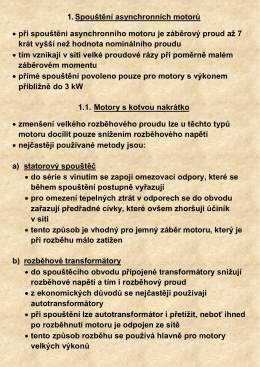
1. Spouštění asynchronních motorů • při spouštěni asynchronního
Měření na unipolárním tranzistoru
Výkon, příkon a účinnost elektrického zařízení
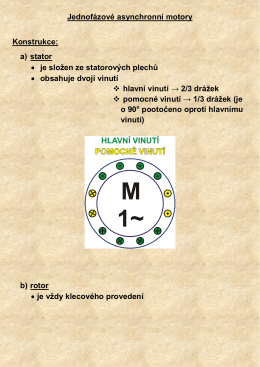
Jednofázové asynchronní motory Konstrukce: a) stator • je složen ze
SZZ Bc. TEK 2015/16
Diagnostika kluzných ložisek
vzor kupní smlouvy
Řízení jalového výkonu synchronního generátoru