Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Elektrické stroje (PB107, KB 107)
Elektrické stroje a pohony (NP006, NK006)
Prospekt MANUALplus 620
L - frengp.cz
Příklady z elektrotechniky a elektroniky – 1
MINIMÁLNÍ PREVENTIVNÍ PROGRAM - plán práce na
Příloha 6 Technika vedení vlaku a hospodárná technologie řízení HV
Kapitola A - Obecné technické informace
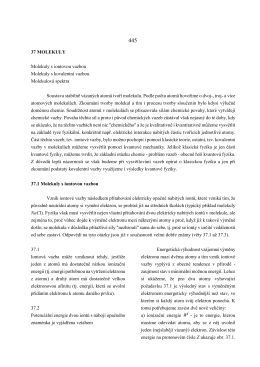
UF-I30
37 MOLEKULY Molekuly s iontovou vazbou Molekuly s kovalentní
t - Ing. Pavel Kobrle
Mechanické vlastnosti PL
Bin. relace
Document
el. stroje 3.ročník
Podpůrný výukový materiál
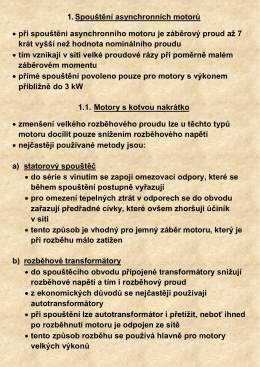
1. Spouštění asynchronních motorů • při spouštěni asynchronního
Měření na unipolárním tranzistoru
Skripta - přednášky - Vysoké učení technické v Brně
Elektromagnetické pole, vlny a vedení (A2B17EPV) – PŘEDNÁŠKY
Synchronní stroje Rozvoj synchronních strojů byl dán zavedením
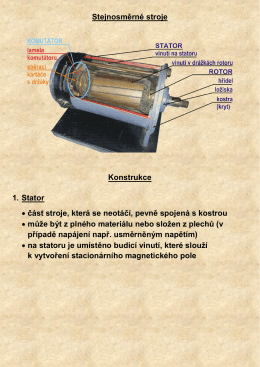
Stejnosměrné stroje Konstrukce 1. Stator • část stroje, která se
zadání a řešení - Fyziklání online