Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
4. MERANIEUHLOV Jednou zo základných úloh v geodézii je
12. Meranie vodorovných a zvislých uhlov.pdf (666866)
Každá prezentácia (max. dĺžka 7 min.) má obsahovať: 1.) Prvá
Stiahnuť PDF - Veronika Pizano
říjen - listopad 2010
Slovenské dotyky 07-08 (PDF - 5,7MB)
zaprazi_02-2014
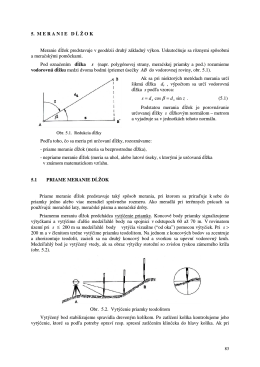
5. MERANIED Ĺ Ž OK Meranie dĺžok predstavuje v geodézii druhý
ELEKTROMAGNETICKÁ INDUKCE DEMONSTRAČNĚ
7. V Ý Š KOV É MERANIE Pri výškovom meraní určujeme výškové
Úlohy z chémie
Technológia ručného obrábania.pdf
Monitorovanie emailov na pracovisku
10 Budovanie vertikálnych referenčných systémov
Výročná správa VKJB - rok 2012 - Verejná knižnica Jána Bocatia
Revitalizácia rieky Moravy: Plán opatrení pripravený v súlade so
12. TECHNOLÓGIA VYTYČOVANIA Nevyhnutným predpokladom
Tarifa MHDBB - Dopravný podnik mesta Banská Bystrica, as
Cabri 3D v školskej stereometrii a metóda pridaj kocku
Kliknite a stiahnite si ho tu... Podklady pre
Elektronický prietokomer a záznamník typu
Zápisnica z vyhodnotenia cenovej ponuky
obsah cvičenia (PDF)