Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
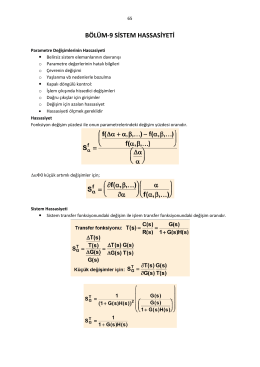
OTOMATİK KONTROL
Laplace Dönüşüm Tablosu (Benjamin C. Kuo)
bilgisayar işletmeni / veri hazırlama ve kontrol işletmeni sınavına
Betonarme_2_4
HİDROJEN ENERJİLİ ARAÇ (HİDROMOBİL) YARIŞLARI
4-Bay Veri Sayfası
SÜREÇ ÖLÇÜMLERİ 1 - Ege MYO-İZKA
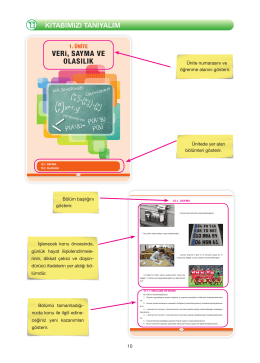
Kitabımızı Tanıyalım - Hayat Boyu Öğrenme Genel Müdürlüğü
Konu Kapsamları - Özel Ege Lisesi
Enformatik
Ara*t*rma Probleminin Belirlenmesi ve Tan*mlanmas*
BİLGİSAYAR MİMARİSİ
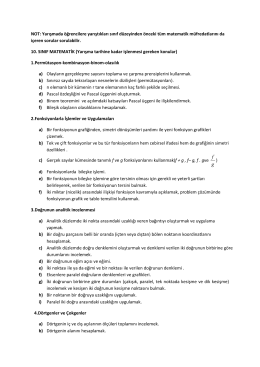
10. Sınıf - Özel Ege Lisesi
(pdf) indirmek için TIKLAYINIZ.
8. Bilişsel Yük Kuramı
144
Politika Öneri Raporunun Tamamını Okumak İçin TIKLAYINIZ
Ticari Patlaticilarin Ideal Infilak Davranislari ve Patlayici/Kaya
Staj Bilgilendirme Sunumu
Hak Devir Sözleşmesi
Gıda ve Yem Şube Müdürlüğü
MPM Momentum Makinası Gelişimi
VMS PLATFORMU