Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Elektrik-8 - Deneysan
Katalóg - Rozoberateľné doskové výmenníky tepla
KUMYAPI- Ihale Dosyasi - kumyapı arıtma teknolojileri
YKFaaliyet 30.06.2014-son
Fiyat Listesi - Alarko Carrier
boru hatları / pıpe lınes
Rozebíratelné deskové výměníky tepla Alfa Laval
BOŞ ZAMAN, REKREASYON VE ETKİNLİK TURİZMİ İLİŞKİSİ THE
uluslararası katılımlı ııı. ege kompozit malzemeler
5. Opamp uygulamaları 2 - Mekatronik Mühendisliği Bölümü
tesisat teknolojisi ve iklimlendirme elektrik motor bağlantıları
elektrik motorları ve sürücüleri 4 (İndirme : 5)
catalogue Read our latest catalog, collateral material or
bir fazlı motorlar - Bülent Ecevit Üniversitesi
Elektrik-5
1941 KB
Pdf 8
SENKRON MAKİNALAR - Bülent Ecevit Üniversitesi
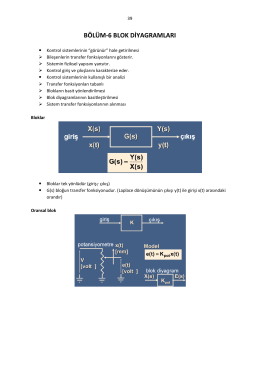
bölüm-6 blok diyagramları
Endustriyel_Olcme_mikrometreler
otomasyon sistemleri - Kocaeli Üniversitesi
Piyasa Yorumu - Turkborsa.net
Biyom - Eodev.com