Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Piyasa Yorumu - Turkborsa.net
Dişlili Motor, Hızlı Devreye Alma Kılavuzuna erişmek için tıklayınız
HEDEF YAŞAM BÜLTEN
vezirköprü ilçesi aile hekimliği nöbet listesi vezirköprü toplum sağlığı
Zpěvník chval
LX HIZLI BAŞLANGIÇ KILAVUZU
kurs broşürünü indirin
Kılavuzu İndir
Haber Bülteni - Diyanet İşleri Başkanlığı
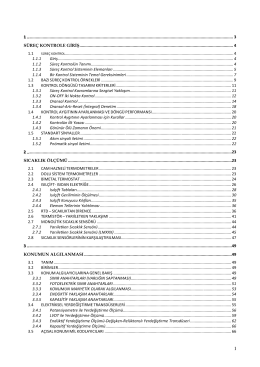
ELEKTRONİK TABLOLAMA
İkl. Sis. Elemanları - yarbis
Genel Bilgi (Ege Üniversitesi) - İdealsan Endüstriyel Otomasyon
MATLAB ile Meslek Matematiği Kullanım Kılavuzu
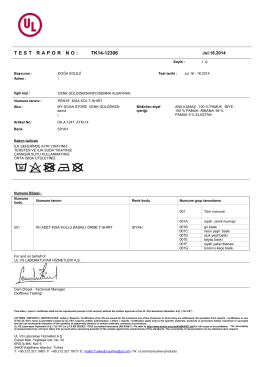
Siyah - My Doğa Store
automatizační prvky elektronické součástky profilové systémy
mevcut binalara yeni asansörler yapılırken yetersiz kuyu alt ve/veya
İzmit Körfezi Sedimentlerinde Polisiklik Aromatik Hidrokarbon ve
Resim Şiir Yarışması - Ekmek İsrafının Önlenmesi
Srdečně Vás zveme k návštěvě našíexpozice na veletrhu
Arduıno Tabanlı Prototip Akıllı Ev Sistemi Tasarımı
OEM ürünleri Sık Sorulan Sorular
PDF dosyası olarak görüntüle
Twido Kitabı - rennovateknik.com