Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Minkowského svět
Kapitola 1 - Úvod do teorie pole
Přípravek pro měření Hallova jevu
Stiahnite
Katalog elementów Deskowanie ramowe ORMA
Pozvánka s podrobným programem ke stažení
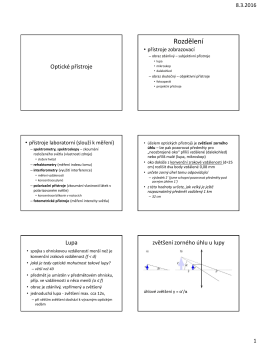
Optické přístroje
Paradox dvojčiat
B27
O pohybu a klidu
Richard Dawkins
Neperiodický zpravodaj občanského sdružení SISYFOS
fizika
Kapitola 9 - Úvod do teorie pole
ke stažení zde
Wytyczne w zakresie kwalifikowania wydatków w ramach Programu
PŘEDMĚT: FYZIKA ROČNÍK: OKTÁVA VÝSTUP UČIVO
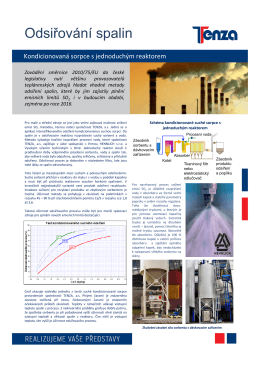
Odsiřování spalin
Jevy na rozhraní dvou prostředí
zde - Supra Praha
Nenechte se vyhodit zbytečně. Zkoušku neudělá ten, . . .
cviká tempo 03/04
t - fyzika.wz.cz