Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
O pohybu a klidu
Sylabus
Světlo ve století světla
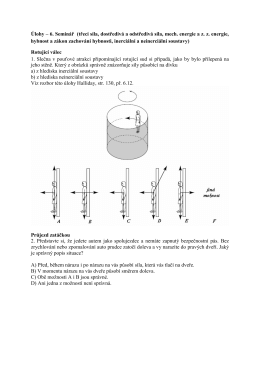
Úlohy – 6. Seminář (třecí síla, dostředivá a odstředivá síla, mech
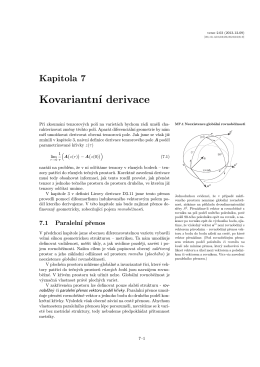
Kovariantní derivace
Kapitola 9 - Úvod do teorie pole
Minkowského svět
STEPHEN HAWKING Černé díry a budoucnost vesmíru
Paul Ricoeur
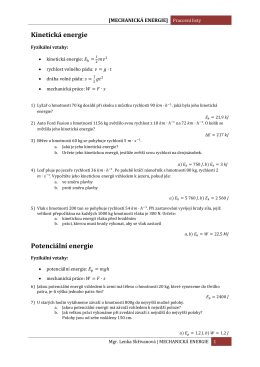
MECHANICKÁ ENERGIE
6×A4
pokračování
CZ návod - ExploraScope
GYM 23 - Školní časopis GYM
Celý text ukázky v pdf
č.3 - Maskil
leden–únor 2013
Sylabus
Neperiodický zpravodaj občanského sdružení SISYFOS
DA 11/2010 - Dobrá adresa
M - Univerzita Pardubice
základy fyziky - Studijní opory s převažujícími distančními prvky pro
Modul 1. Mechanika (kapitoly 1.1-1.7)