Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Kapitola 1 - Úvod do teorie pole
Kosmologie homogenního vesmíru
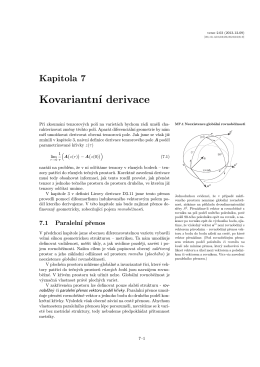
Kovariantní derivace
Minkowského svět
Matematický ústav AV ČR, v - MÚ AV ČR
Holografija u 3D AdS gravitaciji sa torzijom
Fyzika pevných látek
A Zkouškové otázky pro předmět MAT4 A
Hydraulika podzemní vody II (1) 19.2.14. Přetékání, rovnice
Modèles granulaires pour les signaux sonores - Tel
K vyučovaniu základov dynamiky špeciálnej teórie relativity na
Właściwe grupy przekształceń powierzchni homotopijnych i
Aplikovaná matematika IV (NMAF074) LS 2014/15
Písemka 8.1.2007
Conduction thermique et effet Peltier. Etude d`une hélice
Oponentní posudek k dokumentům pro jmenovací řízení doc. Ing
Document