Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PODKLADY PRO PŘEDNÁŠKY - CVUT v Praze, Fakulta strojni
žákovský pracovní sešit - Střední průmyslová škola strojnická, Plzeň
POŽADAVKY KE ZKOUŠCE Z PP I
PRUŽNOST A PEVNOST IA PODKLADY PRO CVIČENÍ
Ozubené převody
Základy technických znalostí ve vodním hospodářství
Program - Firma Doradcza ISOTOP sc
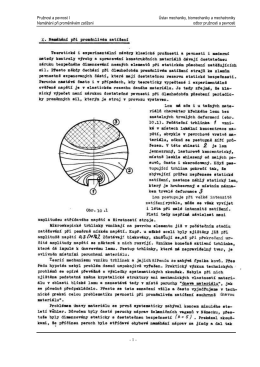
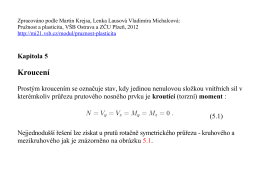
Doplněk skript PP I
Polarizované světlo a fotoelasticita
PŘEDNÁŠKY
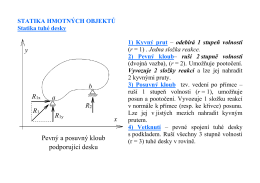
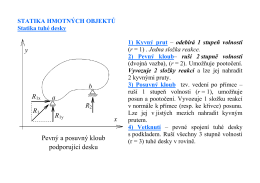
x y a b R1 R2 Pevný a posuvný kloub podporující desku
SKLO, SKLÁŘSKÁ TECHNOLOGIE A VÝROBA SKLA
Suplovanie si môžete pozrieť tu.
PROGRAM KONFERENCE - Strojírenská technologie 2015
Koroze kovů
x y a b R1 R2 Pevný a posuvný kloub podporující desku
SPS-1
Bulletin 1/2011 - Česká společnost pro mechaniku
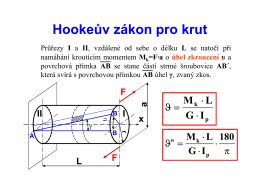
Hookeův zákon pro krut
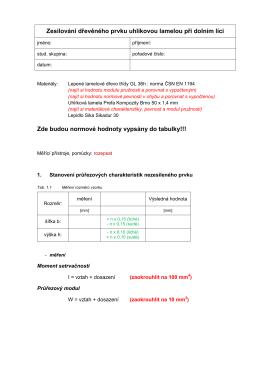
Pokyny pro protokol o zesilování
zveřejněná témata - nástěnka15_16 STK
Stáhněte si č. 35 v PDF - Česká společnost pro údržbu
to get the file