Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
SPS-1
Kánon titulů k maturitní zkoušce z českého jazyka a literatury 2014
TTK-2
pilotní kurzy 2014
žákovský pracovní sešit - Střední průmyslová škola strojnická, Plzeň
II. Základní vlastnosti stavebních látek
2.část
tttropaplyn - Střední průmyslová škola kamenická a sochařská
Sbírka úloh z mechaniky (autorem je doc. Habrman)
Fyzika je kolem nás (Molekulová fyzika a termika) Studijní text pro
to get the file
20144 Příprava na mezivládní konzultace: Máme energii hledat
17. VY_12_INOVACE_CJ_PLB17, R. Rolland – Petr a Lucie.pdf
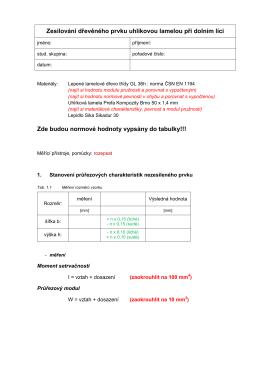
Pokyny pro protokol o zesilování
Fakulta elektrotechnická ČVUT v Praze
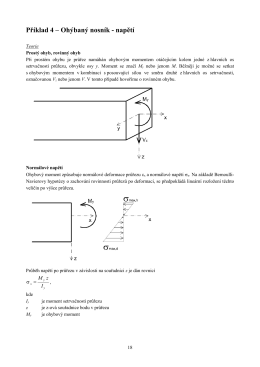
Příklad 4 – Ohýbaný nosník
6.1 Základní pojmy optiky
základy fyziky - Studijní opory s převažujícími distančními prvky pro
PDF Printing 600 dpi - Ústav termomechaniky AV ČR, vvi
PODKLADY PRO PŘEDNÁŠKY - CVUT v Praze, Fakulta strojni
Hydromechanika
žákovský pracovní sešit - Střední průmyslová škola strojnická, Plzeň
Optické sítě