Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Skripta - Teorija kretanja drumskih vozila
2007-3-4
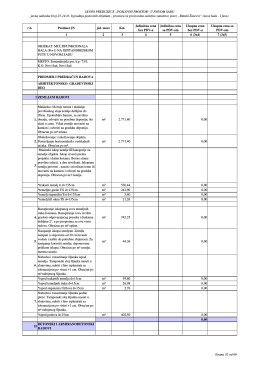
problematika merenja kočnog koeficijenta radne kočnice poluprikolice
Katalog Merni instrumenti za testiranje i
prezentacija - prof.dr Goran Jankes
PRIJANJANJE I KLIZANJE - Teorija kretanja drumskih vozila
овде
KATALOG OPREME ZA PROPAN BUTAN
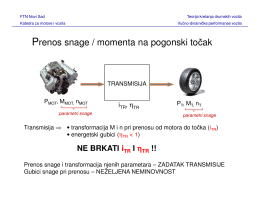
Prenos snage i vučno-brzinska karakteristika
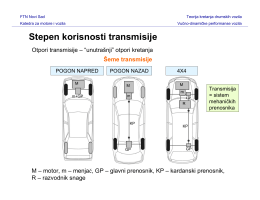
Vučno dinamičke performanse - Teorija kretanja drumskih vozila
Prenos snage i vučno-brzinska karakteristika
Uputstvo za izradu vučnog proračuna
p - Odbor termomechaniky a techniky prostředí
Kavrama
Katalogový list svítidel CZ
MEHANIKA KOTRLJANJA TOČKA - Teorija kretanja drumskih vozila
Kočenje - Teorija kretanja drumskih vozila
Uputstvo za izradu – slajdovi sa vežbi
Polityka prywatności - zj
Izbor prenosnih odnosa - Teorija kretanja drumskih vozila
Artykuł - Inżynieria Ekologiczna
Türkiye Elektrik Tüketimi Öngörüsü ve Bu Kapsamda
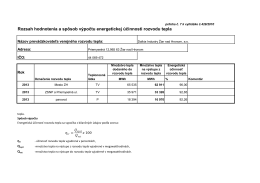
Rozsah hodnotenia a spôsob výpočtu energetickej účinnosti