Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Kočenje - Teorija kretanja drumskih vozila
použití svodidel
PRIJANJANJE I KLIZANJE - Teorija kretanja drumskih vozila
opis przedmiotu zamówienia - Krakowski Holding Komunalny SA w
CH-DI - Wydział Chemiczny PRz
มาตรฐานชิ้นส่วนยานยนต์ และการทดสอบ ความสําคั
tiyatro oyunları gösterimi 05.03.2015 15:08 - erzurum
MEHANIKA KOTRLJANJA TOČKA - Teorija kretanja drumskih vozila
Skripta - Teorija kretanja drumskih vozila
problematika merenja kočnog koeficijenta radne kočnice poluprikolice
Załącznik nr 1 - ADR, BBS, kurs kwalifikacyjny
Avio bombe
Brošura Nove C klase
Katalog - Inter Mehanika DOO
Vario Compact ABS - INFORM
reciklaža pet flaša
merenje usporenja prikolice sa inercionom radnom kocnicom.pdf
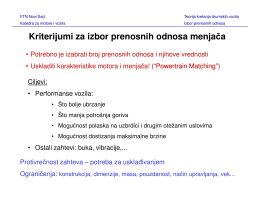
Izbor prenosnih odnosa - Teorija kretanja drumskih vozila
performans esaslı deprem mühendisliğinin temel kavramları