Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
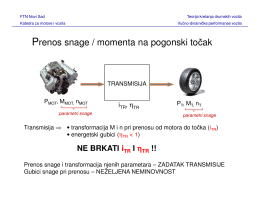
Prenos snage i vučno-brzinska karakteristika
Prenos snage i vučno-brzinska karakteristika
Vučno dinamičke performanse - Teorija kretanja drumskih vozila
Uputstvo za izradu vučnog proračuna
Uputstvo za izradu – slajdovi sa vežbi
Skripta - Teorija kretanja drumskih vozila
Izbor prenosnih odnosa - Teorija kretanja drumskih vozila
Optikai szálfelügyeleti rendszerek
04. Hrustinec
Author ISBN Year Copy Selected by School 1 A First Course in
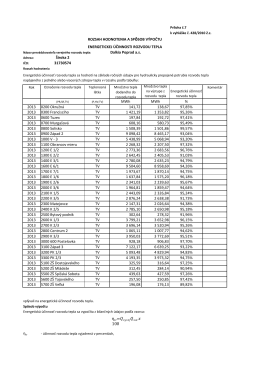
Dalkia Poprad a.s. Široka 2 31730574 MWh MWh % 2013 0200
(IM) ve SABİT MIKNATISLI (PM)
KATALOG OPREME ZA PROPAN BUTAN
Katalog Merni instrumenti za testiranje i
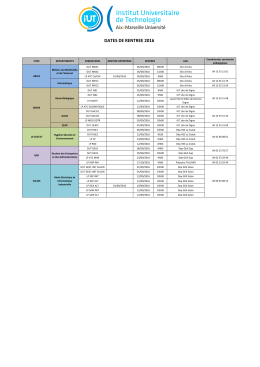
Dates de rentrée 2016
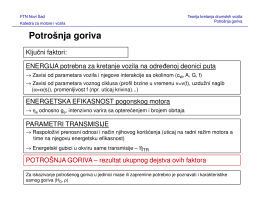
Potrošnja goriva - Teorija kretanja drumskih vozila
Mon CV
Biyolojik Malzeme Tabanlı Fotonik Aygıtlar Sedat Nizamoğlu Elektrik
wniosek o wydanie zezwolenia na usunięcie drzew lub krzewów