Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Uputstvo za izradu vučnog proračuna
Uputstvo za izradu – slajdovi sa vežbi
Vučno dinamičke performanse - Teorija kretanja drumskih vozila
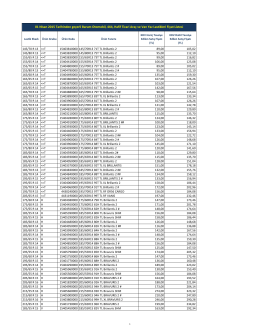
01 Nisan 2015 Tarihinden geçerli Barum Otomobil, 4X4, Hafif Ticari
Goodyear
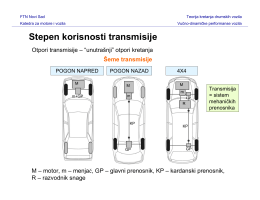
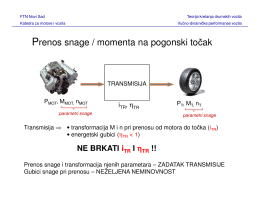
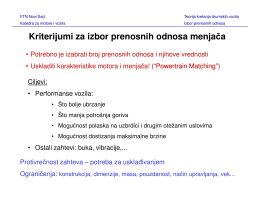
Prenos snage i vučno-brzinska karakteristika
Prenos snage i vučno-brzinska karakteristika
Analýza prostredia 1
Skripta - Teorija kretanja drumskih vozila
Optikai szálfelügyeleti rendszerek
BW400V 5X
indir - LASTİK PARK
Goodyear 2014
Návod k obsluze - T3S
Izbor prenosnih odnosa - Teorija kretanja drumskih vozila
Bridgestone Fiyat Listesi 17.02.2014
Tork konvertörlü DFG/TFG 316–320 ve 425–435 Dizel/LPG forklitler.
Fastrac 8250 a jeho V-TRONIC - JCB trac
Sıra Ürün Kodu Ürün Tanımı Grup 2 Ebat KDV Hariç TL KDV
3899-Saobracaj-Menjaci
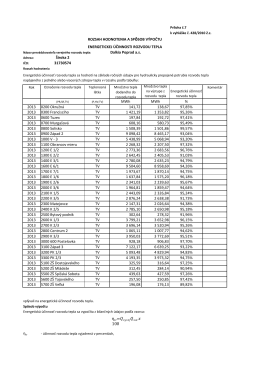
Dalkia Poprad a.s. Široka 2 31730574 MWh MWh % 2013 0200
2007-3-4
Katalog Merni instrumenti za testiranje i