Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PRAKTIKUM IZ DIGITALNE OBRADE SIGNALA
- e-LIS
5 MTK Kodovanje govora
Contents Sembolik değişken tanımlama
PDT 1 - Diskretni signali i sistemi.pdf
Statistika je alat koji je danas neophodan u velikom broju naučnih
B5 00 Za 30. Savetovanje JUKO CIGRE, za Grupu B5, predviđene
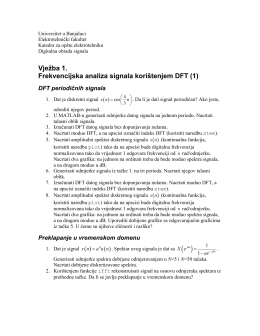
Univerzitet u Banjaluci
Matematika 2 Osnovi elektrotehnike 2 Programiranje 2
Deney 4
Praktikum za za laboratorijske vježb vježbe iz
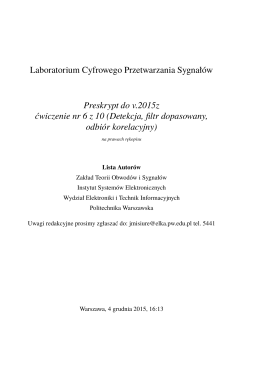
Detekcja, filtr dopasowany, odbiór k
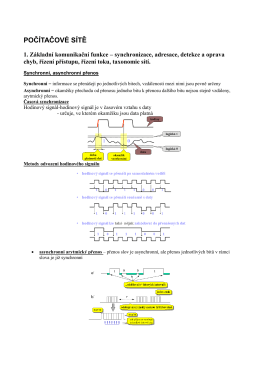
POČÍTAČOVÉ SÍTĚ
Modelování a simulace 2
PDT 4 - Prakticno izracunavanje spektra.pdf
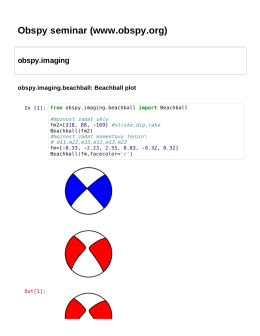
Obspy seminar (www.obspy.org)
the document in pdf format
0 START – Hala ZOSTiR Karlino - - - - 16:40
Obrada signala 1
Svrha predmeta - Ekonometrijska analiza vremenskih serija
Digital Signal Processing on Silicone I. When analogue and digital
Internaupotreba - Fakultet elektrotehnike
Invertori, novo, 05.06.2011., delimično završeno