Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Obrada signala 1
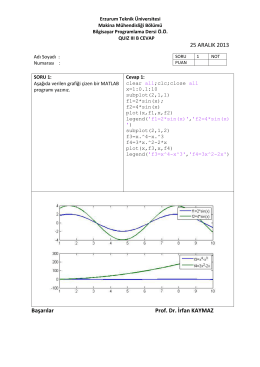
Dosyayı İndir - Erzurum Teknik Üniversitesi
Postup práce ()
3.4 Ověření Thomsonova vztahu – sériový obvod RLC
ANALIZA SISTEMA U KOMPLEKSNOM DOMENU
technika pomiaru prądu i energii
Příklady k přednášce 3
Prem liga 014_Sast ekipe 1.pdf
Legrand My Home
NIKOLA TESLA B
promjene u sestrinskoj sestrinskoj praksi, standardi i procedure
PRAKTIKUM IZ DIGITALNE OBRADE SIGNALA
2014-2015 Eğitim-Öğretim Yılı Bahar Dönemi Ara Sınav Programı