Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Příklady k přednášce 3
HW1 - Ibrahim Beklan Kucukdemiral
1.,.. .J... II
null
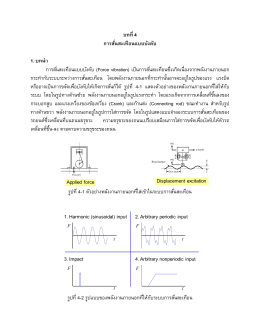
บทที่ 4 การสั่นสะเทือนแบบบังคับ 1. บทนํา การสั่น
Přechodné děje 2. řádu v časové oblasti
Synchronní stroje
mechanické soustavy
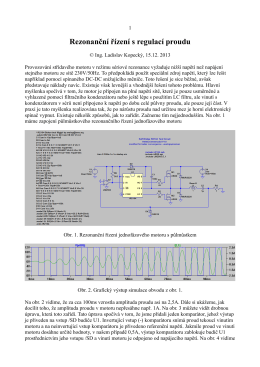
Rezonanční řízení s regulací proudu
Obrada signala 1
Bulletin 2/2012 - Česká společnost pro mechaniku
DF 1 - Uvod.pdf
EKLER
บทที่ 5 การสั่นสะเทือนแบบบังคับจากแรงรูปแบบต 1
Automatická regulácia- vypracované otázky
null
Ch 4 Transient Response
Judyta Prugar - Biuletyn Uniejowski
13 - Návrh frekvenčními metodami
Bir Cosecant Eşitliği
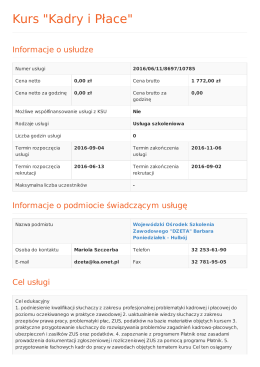
Kurs "Kadry i Płace"
manual - Division of Solid Mechanics
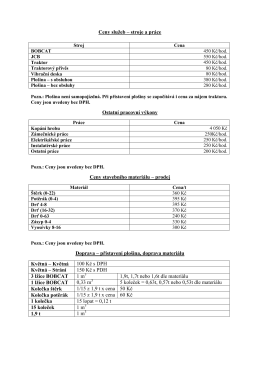
Ceny služeb – stroje a práce Ostatní pracovní výkony Ceny