Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
null
HW1 - Ibrahim Beklan Kucukdemiral
Synchronní stroje
Pokročilé kapitoly z lineární algebry
Příklady k přednášce 3
Energie v teorii relativity
Algoritmy a datové struktury I finální verze 2011 (opravy možné
Slovní úlohy
mechanické soustavy
Konfigurace PID
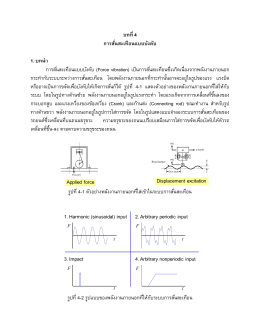
บทที่ 4 การสั่นสะเทือนแบบบังคับ 1. บทนํา การสั่น
Obsah - Analýza metod
STATICKÉ A DYNAMICKÉ VLASTNOST ZAŘÍZENÍ
základy fyziky - Studijní opory s převažujícími distančními prvky pro
A) Otázky za 1 bod 1. Napište rovnici okamžitého zrychlení, znáte
Určování výměr a objemů, dělení ploch
TRUSS4 v7
Některé přímočaré početní úlohy
Modul 1. Mechanika (kapitoly 1.1-1.7)
Přednáška 9
2 Interpolační polynom a splajn 2 Interpolační polynom a splajn
Automatické řízení
Úlohy k přednášce NMAG 102: Lineární algebra a geometrie 2