Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Lekcija 3 - Elektrotehnički fakultet Sarajevo
Lekcija 2: Dizajn mehatroničkih Dizajn mehatroničkih sistema
Lekovito bilje i razvoj turizma Stare planine
NAVIGATOR Uređaji - dijagnostika
Uređaji za upravljanje redovima čekanja
null
SISTEMI REALNOG VREMENA Operativni sistem realnog vremena
Kompaktne centrale za gašenje
KONFORT 760R - dijagnostika
mješoviti izborni predmet - Srce
Plik źródłowy
Indikativni godišnji plan objave poziva na
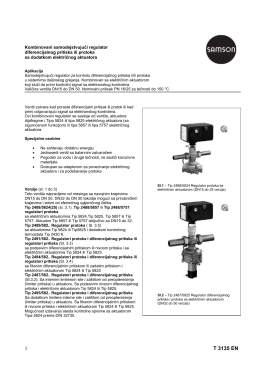
Regulator protoka 2488-5824...5825-SR.pdf
Donanım Içeren Taşit Simülatörü İçin Taşıt Dinamiği
PORODIČNA / OBITELJSKA MEDICINA U FBIH
8x8 Tekerlekli Zırhlı Araç Performans Modeli Geliştirilmesi
Kompilácia projektu a jeho ladenie
TYPE TAM - Početna stranica
Kluczowe elementy jazdy autonomicznej na przykładzie
neuronowa i neuronowo-rozmyta realizacja ruchu nadążnego
STATEFLOW_Ders Notu
Proračunske tablice - Microsoft Excel 2010
Europass CV - etf.unsa.ba