Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
GD100 Kullanım Kılavuzu (Türkçe)
İlçe Milli Eğitim Müdürlüğü Yazısı - mersin
HP RP5 Perakende Satış Sistemi Modeli 5810
Solar Pompa Sistemi
güç elektroniği-ı - KLU - TBMYOELEKTRIK
AC Altay Vektör Sürücüleri Kullanım Klavuzu
kullanıcı klavuzu
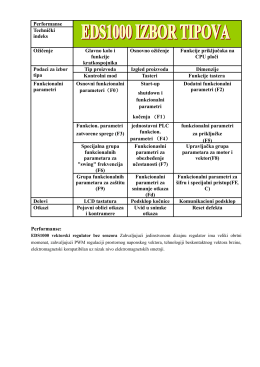
Kratki pregled parametara (Srpski)
kesirler - Kartanelerim.com
k - Porady Elektryka.pl
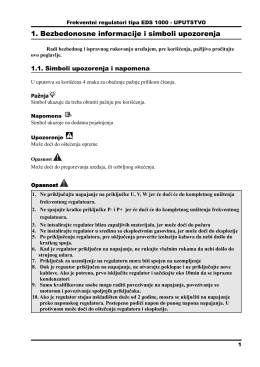
Uputstvo
kullanıcı klavuzu
Hitachi - Broşür Sürücü NE-S1
Kademe
güç elektroniği-ıı - KLU - TBMYOELEKTRIK
ABADE STYLE 356 50923-01-C03
ENGİN KANDIRALI
Origo
alternatif akım devre analizi - KLU - TBMYOELEKTRIK
přepěťové ochrany APLIKAČNÍ PŘÍRUČKA - SEZ
UPUTSTVO ZA MONTAŽU
temel bilgi teknolojisi kullanımı - KLU - TBMYOELEKTRIK
LAB-2: Görevler, Fonksiyonlar ve UDP