Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
AC Altay Vektör Sürücüleri Kullanım Klavuzu
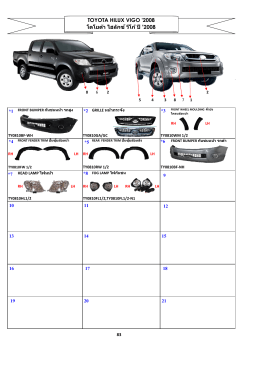
hilux vigo 2008 - tt(iki)autopart co.,ltd.
HİDROJEN ENERJİLİ ARAÇ (HİDROMOBİL) YARIŞLARI
7. Bölüm Sayaçlar
DÖKÜMAN İNDİRDS6878-SR-Teknik Özellikleri
yükle - Domak Su Pompaları
GD100 Kullanım Kılavuzu (Türkçe)
kullanıcı klavuzu
kullanıcı klavuzu
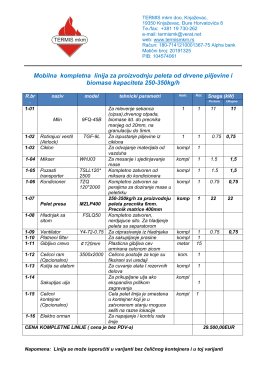
Mobilna kompletna linija za proizvodnju peleta od drvene piljevine i
ostim gazetesi pdf arşivi için tıklayınız
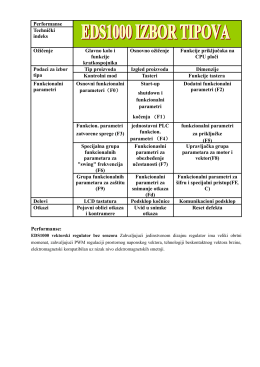
Kratki pregled parametara (Srpski)
Otomobillerde Kullanılan Fren Diski Hasar Analizi
korloy yeni ve daimi satış ürünleri
LİSANS YERLEŞTİRME SINAVI-5 YABANCI DİL TESTİ (İNGİLİZCE
UPUTSTVO ZA MONTAŽU
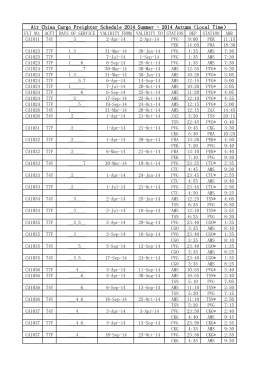
Air China Cargo Freighter Schedule 2014 Summer
Masine jednosmerne struje
proof startegies preferred by students in the geometry
Thermo Scientific Excelsior AS Kullanım Kılavuzu A82310100 Issue 6
ENC MAGNET KONTROL SİSTEMİ TEKNİK PLAN
OBODNE PUMPE AQUAMAT I AUTOMA
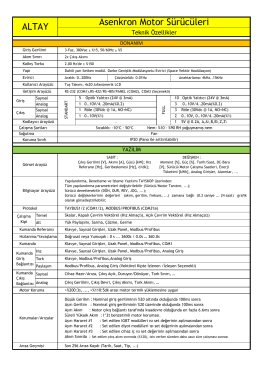
ALTAY Asenkron Motor Sürücüleri