Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
kullanıcı klavuzu
kullanıcı klavuzu
Computer-Steuerung_RP_TR-einzelseiten PDF.indd
Beybi Sanayi Eldivenleri
Vranje – jug s merak
Uchwała Nr …………………… / 2003 - BIP Urzędu Miasta Włocławek
AC Altay Vektör Sürücüleri Kullanım Klavuzu
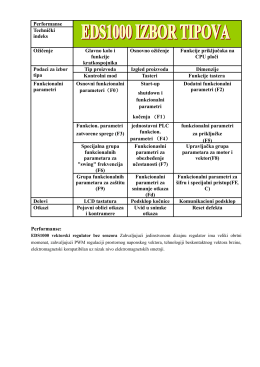
Kratki pregled parametara (Srpski)
Uputstvo
Ovládacie jednotky k čerpadlám
GD100 Kullanım Kılavuzu (Türkçe)
"Nove mogucnosti Wifi pristupa Internetu", Prof. Dr
hayvan içme suyu göletlerinin önemi
ELEKTRONİK REGÜLATÖR
ovládání motorů stykači dvojtlačítko, reverzace, hvězda
Kontrol Kumanda Elemanları Deneyi - Enerji Sistemleri Mühendisliği
Linguistic Essentials-2
1.Gün_02 - 1145 - 1300 - Gürültü haritalama nedir
Yurt Dışı Gelişmeler DenizBank Ekonomi Bülteni 11
ETNA frekans kontrol sürücüsü kullanma kılavuzu
VFD-V - Delta Otomasyon • Ana sayfa
PDF Broşür İndir - Ürkmez Mühendislik
PDF