Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
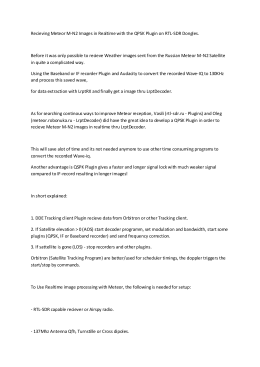
Recieving Meteor M-N2 Images in Realtime with the - RTL
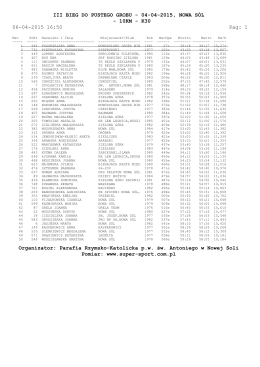
III BIEG DO PUSTEGO GROBU - 04-04-2015, NOWA
svi slajdovi u jednom pdf fajlu
มฤตยูนอกโลก - สำนักกิจการอวกาศแห่งชาติ
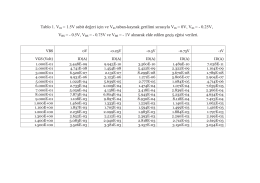
Tablo 1. VDS = 1.5V sabit değeri için ve VBS taban
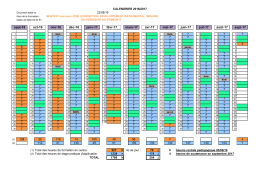
Calendrier CDIM 16-17
prezentacija, 8th week
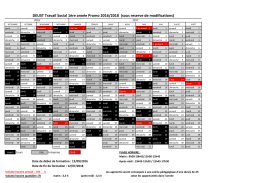
DEUST Travail Social 1ère année Promo 2016/2018 (sous reserve
GNSS Uydusu Kepler Yörünge Elemanlarının Spektral Analizi
BIOGRAFIJA SA BIBLIOGRAFIJOM • Ime i prezime: Mejra Softić
Direkt-Download
Metodologija NIR-a - treći dio - - Ekonomski fakultet
RdV Place de Concremiers - Association des Marcheurs de
FMRC Fluid Mechanics Research Seminar Series ITU/FAA
25 TUSAGA-AKTİF (CORS TR)
biyomedikal uygulamalarda kullanılan biyomalzemeler
NO ADI SOYADI ÖĞRENİM DURUMU T.C. NO ÖĞRETMENL İK
13 Alat za elektroniku
ITU_SBP_Guide_20142015_ECTS_Outgoing
Görüntüle
Jenerik Dosyası - Kafkas Üniversitesi