Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
biyomedikal uygulamalarda kullanılan biyomalzemeler
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
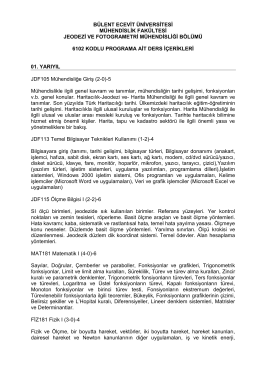
beü mühendislik fakültesi geomatik mühendisliği bölümü ölçme
İndir - Teknolojik Araştırmalar
İndir - Teknolojik Araştırmalar
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
SUUNTO AMBIT2 R 2.0
Úloha 2: Dráha GNSS družice a navigační RINEX
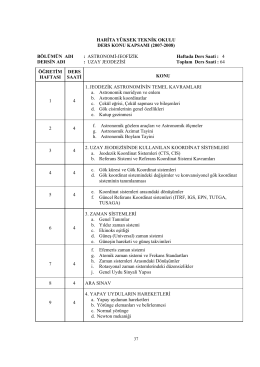
HARİTA YÜKSEK TEKNİK OKULU
Öğretim Planı Değişikliği - Geomatik Mühendisliği Bölümü
bildiri
İndir - Teknolojik Araştırmalar
Uzaktan Algılama Verileri Yardımıyla Yer Yüzey Sıcaklığının
İndir - Gıda Teknolojileri Elektronik Dergisi
İndir - Teknolojik Araştırmalar
Atıksulardan Azot Gideriminde Kısmi Nitrifikasyon
Systémy GNSS a jejich využití pro navigaci nevidomých
Görmek İçin Tıklayınız
stáhnout - USP Hrabyně
Liste İçin Tıklayın