Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Úloha 2: Dráha GNSS družice a navigační RINEX
ระบบควบคุมวงโคจรของดาวเทียม
Váženfl pane Novák,
13.cü hafta: İLERİ GRAFİKLER
Ćw. 5 - Metoda detekcji zespołu QRS na
Gradient
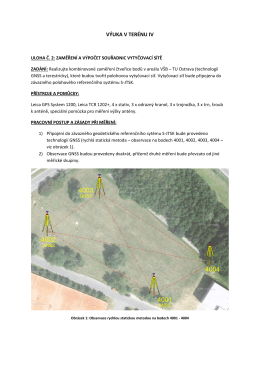
VÝUKA V TERÉNU IV
MATLAB Ek Ders 3
Matlab - veµmi stručný prehµad
Optické přístroje Fyzikální kabinet GymKT Gymnázium J
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
biyomedikal uygulamalarda kullanılan biyomalzemeler
MATEMATIKA I MATLAB