Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Planet Mekanizmaları
ege üniversitesi tıp fakültesi gelişim sınavı komisyonu çalışma esasları
Teknik Resime Giriş
Resmî Gazete - İstanbul Ymmo
el. stroje 3.ročník
Ödev
İSTATİSTİK II – 2.Ödev I. ve II. öğretim A grubu, Karma Öğretim
Öğrenci Toplulukları Yönergesi - Mehmet Akif Ersoy Üniversitesi
lisansüstü tez yazım kılavuzu - Sosyal Bilimler Enstitüsü
Opsiyonel Ekipmanlar
EOSMEC Kontrol Eğitim Kiti
Ankara Yenimahalle, Etimesgut ve Çankaya
2_4_Birbirine_Bagli_Hareket
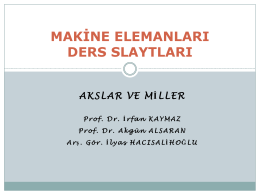
Çalışma alanınızı en üst düzeye çıkarın.
karar 316 torku konyaspor basket – muratbey uşak sportif tbl
363636 - Salihli İlçe Milli Eğitim Müdürlüğü
Adım adım - MS Motorservice Deutschland
Hermetik Ameliyathane Kapısı Teknik Şartname Örneği
Katılım Koşulları
acil durum planı - İzmir Güney Kamu Hastaneleri Birliği Genel
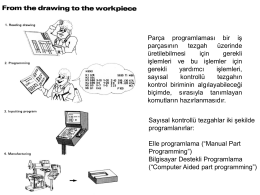
cnc programlama 1
Olasılık Çalışma Kağıdı-2
null