Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
DIPLOMOV´A PR´ACA
ของเล่นพัฒนาสมองเด็กอนุบาล
Zadania 1. série letnej casti KMS 2014/2015
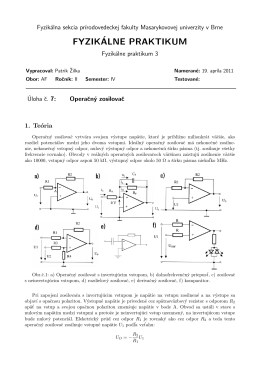
FYZIK´ALNE PRAKTIKUM
Webové rozhranie pre meteorologickú stanicu
vysok´e uˇcení technick´ev brnˇe tvorba automatick´ych obchodních
ELEKTRICKÉ FILTRE
Programovanie, 1. prednáška
Katalogový list
Témata k MZ – profilová část A4.E, C4.E
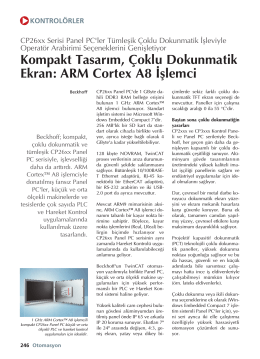
Kompakt Tasar›m, Çoklu Dokunmatik Ekran: ARM Cortex A8 ‹fllemci
TOPOGRAFICKÉ PLOCHY Dalš´ı krivky na topografické ploše
DIPLOMOV´A PR´ACA
Rozmerová analýza
Principy telefonní signalizace SIP
Slovenská technická univerzita v Bratislave Fakulta
otomasyon sistemleri - Kocaeli Üniversitesi
Tmobile_ECHO_2011_1
Webové prohlížeče
Matematická logika
1 Zhluková analýza 2 Vektorová kvantizácia
Operačný zosilovač
Programovanie, 4. prednáška