Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
DIPLOMOV´A PR´ACA
Algoritmy pre rozpoznávanie obrazcov pri štúdiu
Webové rozhranie pre meteorologickú stanicu
DIPLOMOV´A PR´ACE
vysok´e uˇcení technick´ev brnˇe tvorba automatick´ych obchodních
Fonksiyonel Değerlendirme (Göksel Altınışık)
HEURcv LS2015 #1
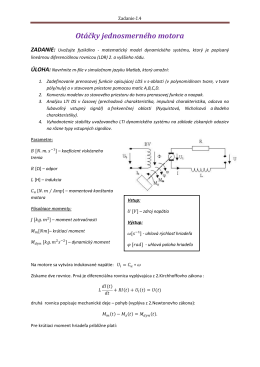
Z4-Otáčky jednosmerného motora
DIPLOMOV´A PR´ACA
Rozmerová analýza
DME ARCs a POINT-TO-POINT
2016 BULLETIN CS BOAT Wakeboard Lac de Joux
Simulácie ako prostriedok k zlepšovaniu výcviku štábov KM
Test Driven Development - [Programování rízené testy]
vysok´e uˇcení technick´ev brnˇe optimalizace investiˇcního portfolia
04 164 27 21 14 00g Vıeobecný návod k obsluze
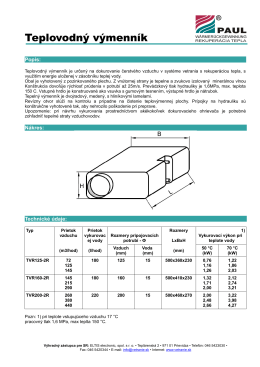
Teplovodný výmenník



![Test Driven Development - [Programování rízené testy]](http://s2.readgur.com/store/data/000334652_1-724ce0030c0158f2d2af170521768f8b-260x520.png)