Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Slovenská technická univerzita v Bratislave Fakulta
Rozwój systemu robota mobilnego
ePodací hárok
RTP stream dát typu časových priebehov
Пројектовање технолошких процеса
Informačné Technológie - Aplikácie a Teória
Podmienky_prijatia_II_stupen_2014_2015_na zverejnenie
NEKE DEFINICIJE: Računar je uređaj opšte namene, koji služi za
Diplomová práce Polymorfn´ı aplikace pro systém Android
analýza a zpracování řečových a biologických signálů sborník prací
Programovanie, 1. prednáška
Algoritmy pre rozpoznávanie obrazcov pri štúdiu
DIPLOMOV´A PR´ACA
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ VYUŽITÍ
Matematická logika
Kompilácia projektu a jeho ladenie
Operačný zosilovač
Praktické výsledky budovania eGovernment-u v oblasti
Procedúry a funkcie - Programovanie v jazyku PASCAL
Stáhnout - AT konference
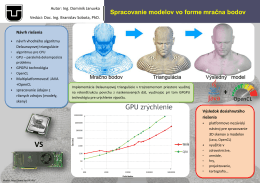
Spracovanie modelov vo forme mračna bodov