Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
İlan Metni
Kompresörler 2 Deneyi - Hidromekanik ve Hidrolik Makinalar
s - Düzce Üniversitesi
s - Dumlupınar Üniversitesi
Elektronik Teknikerliği B
bilecik şeyh edebali üniversitesi makine ve imalat mühendisliği
ÖDEV # 7 1- Uzayda dolaşan bir roketin hareket denklemi = (100
Sayısal Analizde Hata
nesneye yönelik programlama-javajava
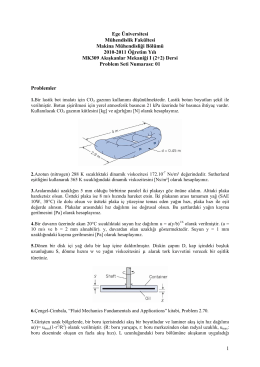
Ege Üniversitesi Mühendislik Fakültesi Makina Mühendisliği Bölümü
Bitirme Çalışması – Yazım Kılavuzu
s - Düzce Üniversitesi
Sinyal Türleri - Düzce Üniversitesi