Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Teknoloji ve Drama Temelli Bir Matematik Eğitimi Projesinin
MATLAB Ek Ders 1
MATLAB Ek Ders 3
Lab-1 Ön Çalışma
ele 210 matlab örnek sorular-1
Instrukcja do ćwiczeń laboratoryjnych Nr 9
Yildiz Teknik ¨Universitesi ˙Iktisat Bölümü Yüksek Lisans Programı
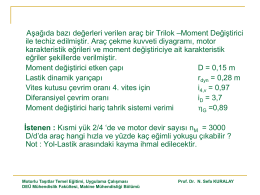
Aşağıda bazı değerleri verilen araç bir Trilok –Moment Değiştirici ile
6.Deney Föyü - rifat benveniste
Z4-Otáčky jednosmerného motora
m - yarbis
TCMB PARA POLİTİKASI KURULU TOPLANTISI ÖNCESİNDE 21
ayrık-zamanlı kontrol (~ dijital kontrol)
bm 206 sayısal çözümleme
Kültür ve İnsan Kaynakları Uygulamaları
bölüm 3-2
Deney 4
Document
GC (İndirme : 33)
Kırıkkale İl Protokol Listesi İçin Tıklayınız
MATLAB
- cerrah inşaat - tanıtım
hafta11