Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Výpočty MKP - nelinearity - Aplikovaná mechanika
t - Výpočtové postupy MKP
Asystent-/ka ds. administracyjno- księgowych z językiem francuskim
Bartecky: SPOJENI ANSYS CLASSIC S AUTODESK MOLDFLOW.pdf
Installation and mounting manual for EK-FC470 GTX water
Installation and mounting manual for EK-FC480 GTX water
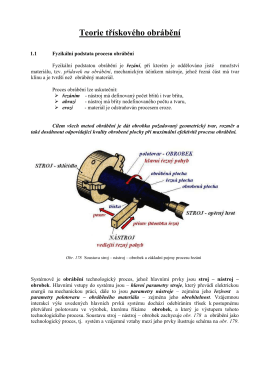
11. Teorie třískového obrábění
PRŮVODCE TUTORA
Prof. Ing. Juraj Valsa, CSc.
Özgeçmiş Dosyası İçin Tıklayınız - Elektrik
Účastníci jednání - Metropolitní ozvučná deska
26 – Nelineární systémy a řízení
E-Vlivy 3 - EGC - EnerGoConsult ČB sro
My Document
Numerické metody a programování Lekce 7
TSP – M Ponorné sondy pro měření hladiny
ROTAČNÍ KYVADLO - DCE FEL ČVUT v Praze
Eki buraya tıklayarak görüntüleyebilirsiniz
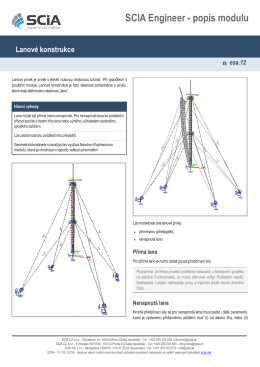
Systémová fasáda SCALEO Systémová fasáda MODULO
Platy českých učitelů zůstávají velmi nízké1 - IDEA - cerge-ei
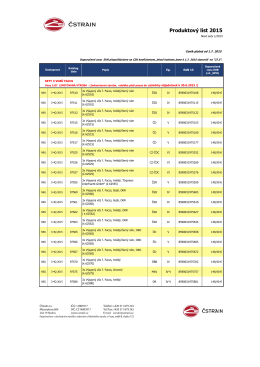
Ceník limitované nabídky setů ČStrain 2015