Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
26 – Nelineární systémy a řízení
ISOL600 - Rawet sro
Gromacs - Pokročilé vzdělávání ve výzkumu a aplikacích
Operace se zlomky
ROTAČNÍ KYVADLO - DCE FEL ČVUT v Praze
Aktuátory pro bezpečnostní spínače CES-AR/AP-C01
Teorie vědy 2011-4
Informatika – Teorie informace
TSP – M Ponorné sondy pro měření hladiny
Nelineární prvky a obvody - UTEE
Document
Document
Honeywell Témata magisterských prací 2014/2015 (Brno)
DOT smartDIRC - manuál - srpen 2010
Uživatelská příručka systému TERA
Prezentační dovednosti - Školství
Fakulta elektrotechnická ČVUT v Praze
Mindshare
4 - Vlastnosti systému: Stabilita, převrácená odezva, řiditelnost a
Hodnoty a hodnotová orientace adolescentů
Zelený bonus 3 do tisku.indd
Text ke stažení ve formátu PDF
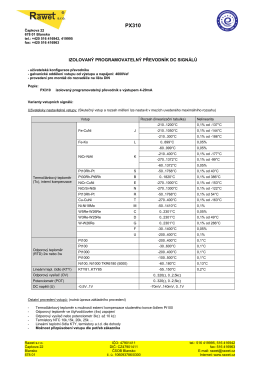
PX310 - Rawet sro