Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Nelineární prvky a obvody - UTEE
Světelné zdroje
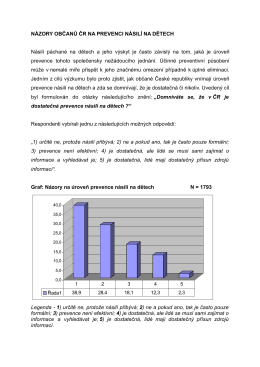
Názory občanů ČR na prevenci násilí na dětech ()
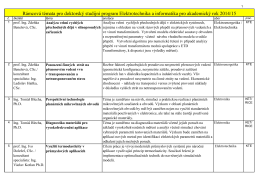
Rámcová témata pro doktorský studijní program Elektrotechnika a
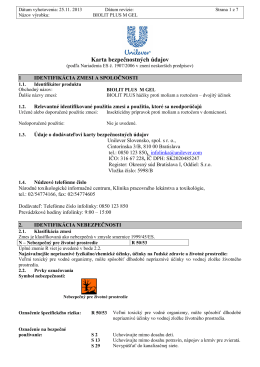
BIOLIT PLUS M GEL
ISOL600 - Rawet sro
Pracovní sešit k přednáškám
ROTAČNÍ KYVADLO - DCE FEL ČVUT v Praze
Elektrotechnika 2 (BEL2) - pracovní sešit pro přednášky
06 - Regionální segmentace a shlukování
Organizace přezkoušení §4 pro EEKR
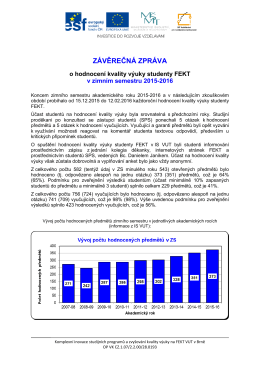
Hodnocení výuky Závěrečná zpráva studijních proděkanů o
Grafické zpracování závislostí – laboratorní cvičení z FCH I http
26 – Nelineární systémy a řízení
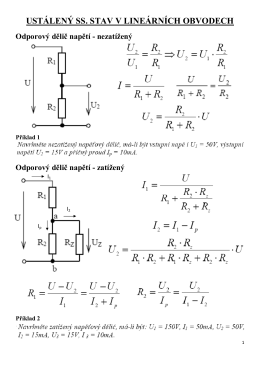
USTÁLE Ý SS. STAV V LI EÁR ÍCH OBVODECH Odporový dělič
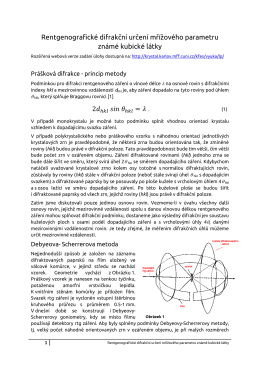
Rentgenografické difrakční určení mřížového parametru známé
Mikrokontroléry letí 2015
Seperasyon
Závěrečná zkouška z MV011 Vzorové zadání
Uzavírací ventily LDM s ručním kolem
Analogové elektronické obvody (AEY)
View/Open
Postavení osob se zdravotním postižením na trhu práce v městě Brně