Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Numerické metody a programování Lekce 7
Numerické metody a programování Lekce 7
Cvičení 1
Zkoušková písemná práce z předmětu MAT4 - ukázka
4 Funkce Lineární funkce, přímá a nepřímá úměrnost
Základy programování v programu MATLAB
1. Vyhledávání v textu
Metodický pokyn
2016-07-05 - SPT Lomnice
formulář můžete stáhnout zde - 7. zasedání zastupitelstva MČ Praha
8. DÚ
Honda CR 125
Husova kazatelna
Základy elektrotechniky – ZAET – Děčín – ZS 2013/14
Konštitutívne rovnice hyperelastického materiálu (Úryvok)
Hledání druhé odmocniny Newtonovou metodou
tyto
zde
Numerické řešení nelineárních rovnic
Růže od jezera Naivasha do našich květinářství
Editorial
Metodika Architecture First a její podpora v prostředí BlueJ++
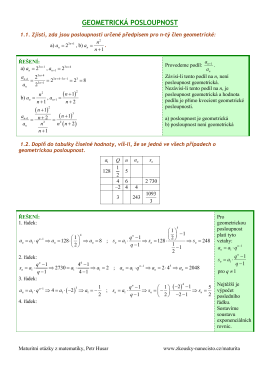
geometrická posloupnost