Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
t - Výpočtové postupy MKP
Umre - Şuhut İlçe Milli Eğitim Müdürlüğü
D14. Viskoelasticita. Maxwellov model. Kelvinov (Voigtov)
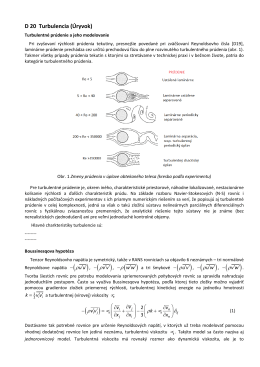
D20. Turbulencia. Turbulentné prúdenie a jeho modelovanie. RANS
Seminář z prostorů funkcí 20.4.2016
Bartecky: SPOJENI ANSYS CLASSIC S AUTODESK MOLDFLOW.pdf
Výpočty MKP - nelinearity - Aplikovaná mechanika
Osnove objektno orijentisanog programiranja Microsoft
Coleoptera: Scolytidae
Kap.23 Analýza zviazaných fyzikálnych polí. Úvod a základné pojmy
podprogram
Obsah publikácie
Program Hakkında
Ústav aplikovanej mechaniky a mechatroniky, SjF STU
A sorbanállás elmélete
Seria NetBlazer do Wielopoziomowej Analizy
jazykové konštrukcie pre riadenie Programovací jazyk C
D13. Pružne plastická úloha rovinnej napätosti. Rovinná napätosť
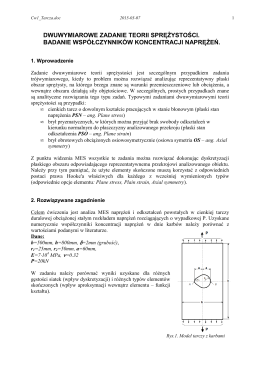
Instrukcja do ćwiczenia Nr 1 (Tarcza)
Specyfikacja modułu FTB-860
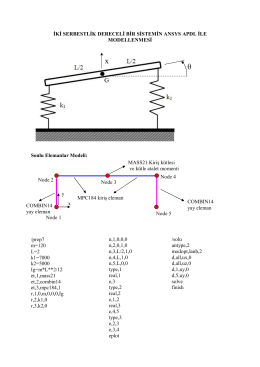
İKİ SERBESTLİK DERECELİ BİR SİSTEMİN ANSYS APDL İLE