Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
digitální spojovací pole
Tanulni
VIII. slovenský kongres chirurgie ruky
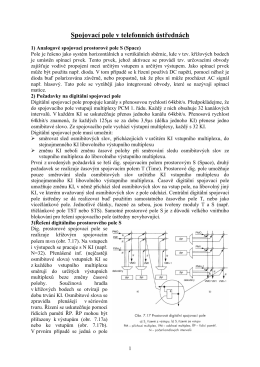
Spojovací pole v telefonních ústřednách
null
Problematické otázky v našich dějinách
Témata k MZ – profilová část A4.E, C4.E
XtendLan | 2 drátový systém - Elektroinstalace Revize Praha
Zde - ks_feld
Prospekt FD-Automat
TAGRA.eu TRUCKER (pro řidiče jednotlivce)
Stáhnout
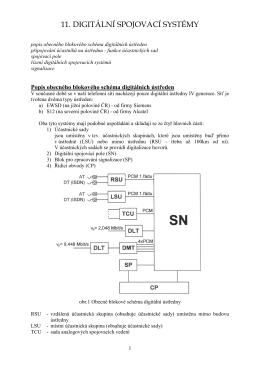
11. DIGITÁLNÍ SPOJOVACÍ SYSTÉMY - Telskol
ürün kataloğu - Pvc ısı yalıtım fitilleri ,pmma(akrilik),pc (polikarbonat
OTÁZKY KE ZKOUŠCE PŘEDMĚTU X32TSS
Instalační manuál - Domovní telefony a videotelefony
…více než dobrá elektronika!
Základy spojovací techniky - Střední průmyslová škola na Proseku
Nařízení Řím I - právo rozhodné pro smluvní závazkové vztahy
Opakovani C
Právní prostředí v Rusku a podmínky pro české podnikatele
Telco PH-895ID CZ
Uživatelská příručka 4038/4039/4068