Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Sborník - Most k partnerství
SCENARIO ZA ČAS
OPTISONIC 6300 Quick Start
– Oblíbené mezi majiteli zahrad - DLF
Didaktický test
Newsletter č. 1 měsíčníku Moderní obec z 7.1.2015
Audioweb.cz Fórum / VMA-II: Dexon IRB20, Tang-Band W5
plastické hmoty.pdf
HARMONOGRAM ÚVODNÍHO SOUSTŘEDĚNÍ STUDENTŮ 1
Çizgi İzleyen Robotlar
DRC032
แผนการทดลองแบบจตุรัสลาติน (Latin Squares)
Strana 108-139 Fotometrie
S7-1500 - Siemens
Eylül 2014 - Iğdır Üniversitesi
null
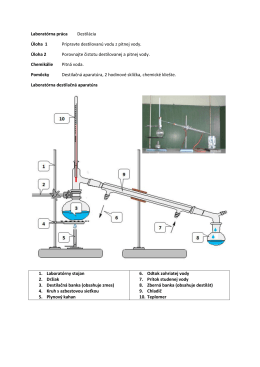
Laboratórna práca Destilácia Úloha 1 Pripravte destilovanú vodu z
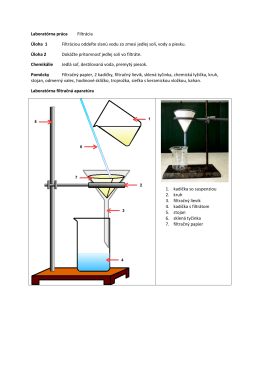
Laboratórna práca Filtrácia Úloha 1 Filtráciou oddeľte slanú vodu zo
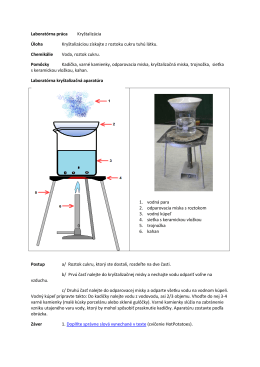
Laboratórna práca Kryštalizácia Úloha Kryštalizáciou získajte z
Tematický výchovno-vzdelávací plán z chémie pre 7. ročník
Moje miesto v dnešnom meste
Zde - Umírání.cz
Utilisation de la plateforme Moodle pour enseigner la physique