Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
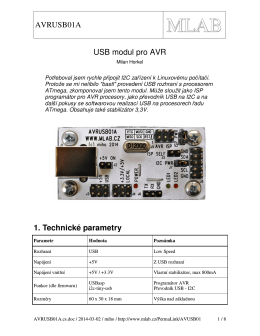
Manual - česká verze
Vick mini dlg építési útmutató.docx
Zajištění kovových válcových dílů
NÁVOD NA POUŽITÍ - raj
Zpravodaj MěV 5
CESTOU DO ŠKOLY CESTOU DO ŠKOLY
Pobierz - Combustion Engines
11 A Toplam Ders Saati : 40 Sınıf Öğretmeni
Test vysílače DC24
Dělení a základní části letadel.pdf
PDF verze
Arkeoloji bilimi ve hava fotoğrafçılığı - Arkeoloji Bölümü
Geometrické vyhledávání
Oznámení o skutečnostech nasvědčujících tomu, že
3 fázové 1MJ7 220 - 313 asynchronní motory
Brožura ke stažení
5 Beskydských vrcholů očima náhradníka.
svahový soubojový speciál
F4XT NÁVOD K POUŽITÍ
Navod k nabiječce zde
Zlín Z-526AS
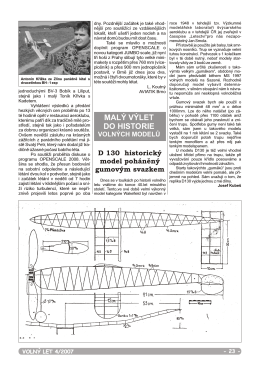
23 - 25 - Volný let
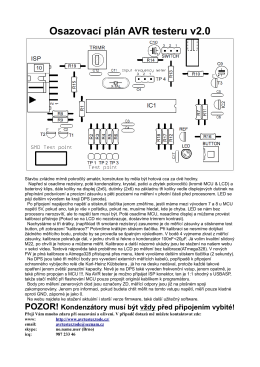
Osazovací plán AVR testeru v2.0