Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Elektromotorni pogoni - Elektrotehnički fakultet
Poslovni uzlet grada Šibenika Gradska vijećnica, Trg Republike
Obráběcí stroje - Katedra výrobních systémů
VALENTIN:Sestava 1.qxd
Četvrta vežba Eksperimentalna analiza rada regulisanog
Preuzmite u .PDF formatu!
FIZIČKA ELEKTRONIKA - Katedra za mikroelektroniku
Frekventni regulatori-prednosti korišćenja (SRB)
08a Merenje u regulisanim elektromotornim pogonima.pdf
AMA<
AG u prostoru
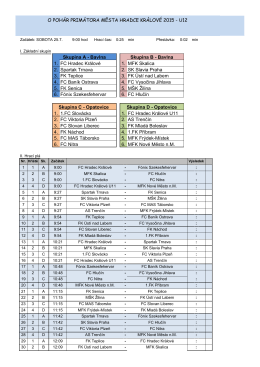
HERE - o pohár primátora města hradce králové
RDE301 Sentaks IA RDE301 Sentaks IA RDE301 Sentaks IB