Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Dengeleme Hesabı
Člověk a příroda Přírodopis 2. stupeň
ingilizce hazırlık sınıfı 2014-2015 track 2 sınıf listeleri
Oracle BI Answers
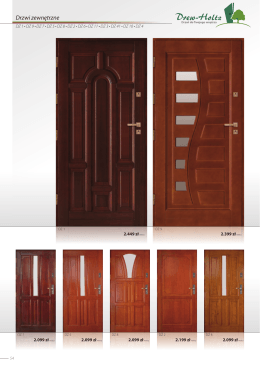
Drew-Holtz katalog 2014 wer2.indd
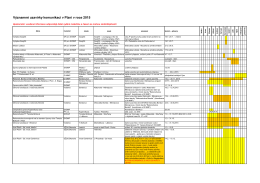
Přehled uzavírek plánovaných v roce 2015
2014-2015 Öğretim Yılı Güz Dönemi Lisans 1. Ara Sınav
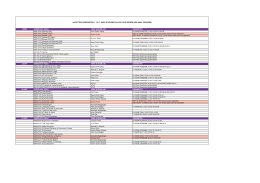
2014-2015 Öğretim Yılı Yaz Dönemi Lisans Final Sınav
Dengeleme Hesabı 1
Dengeleme Hesabı 1
Turkish Mevduat Taken - Eğer mahkeme duruşma isteği 28 gün
ENR850 Qualité de
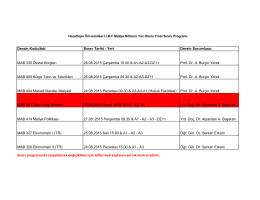
ingilizce programı - Hacettepe Üniversitesi İktisat Bölümü
3M - materiały ścierne Cubitron II i środki ochrony Speedglass
Arş. Gör. Nurbanu Yılmaz Arş. Gör. Fulya Zorlu Arş. Gör. Esma Nur
comptes annuels du 31 decembre 2014
ilgi yazı için tıklayınız - Dinar İlçe Milli Eğitim Müdürlüğü
Autodelovi - manžetne, spone, cilindri, brisači, gumice
RZUT PRZYZIEMIA
Diyabette Bariatrik Cerrahiye Evet
Vytápění a větrání Část 16. - Strojnícka fakulta
Zadaci za prvu pismenu provjeru - MODUL 6
IC TREFA TRUCK & BUS