Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
mkt 2014 - Proje Tabanlı Mekatronik Eğitimi Çalıştayı
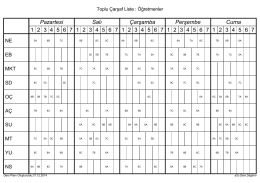
Pazartesi Salı Çarşamba Perşembe Cuma 1 1 1 1 1 2 2 2 2 2 3 3 3 3
Pdf İndir - On5yirmi5.Com
1. GÜN PROGRAMI (22 Mayıs 2014, Perşembe)
A ĞUSTOS 2014 SA Y I 3 Business
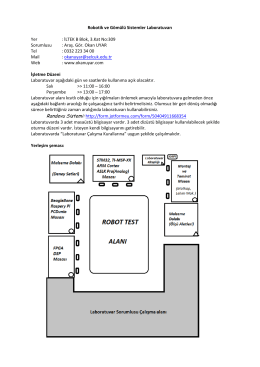
Robotik ve Gömülü Sistemler Lab.
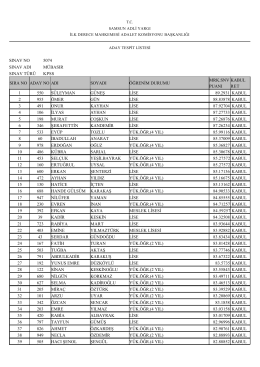
mübaşir sınav başvuru ve aday listesi
kaynak yöntemleri - A. Alper Cerit, PhD
Bursagaz Sürdürülebilirlik Raporu
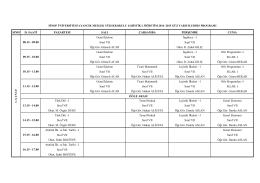
SINIF D. SAATİ PAZARTESİ SALI ÇARŞAMBA
Arduino Kullanarak Web Tabanlı Klima Kontrolü
Yatak Yaraları ve Komplikasyonlar
Galgagyörki Napló 20. szám 2013. október
ทดลองเล นไมโครคอนโทรลเลอร ตระกูล MCS
Güzel Sanatlar Enstitüsü
dswsdddssda e8 Paslanmaz çeliklerle çalismak
R - Karadeniz Teknik Üniversitesi
Download (PDF, 391KB)
Ders programlarına gitmek için tıkla.
TEMEL ELEKTRON*K -1- - Hacettepe Üniversitesi Robot Topluluğu
elektron ışını ile işleme
SSD
Öznitelik Çıkarma Yöntemleri