Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PLC
elektrikli unox konveksiyonlu fırın kullanım kitapçığı
Infobroschüre Türkei
sıemens s7-300 eğitim notları - İÜ
update 01/14 (pdf 4,23 mb)
Kullanım Klavuzu
LUBRIMAC 2011 katalog
ikincil saklayıcı cihazlar mağnetik ve optik diskler
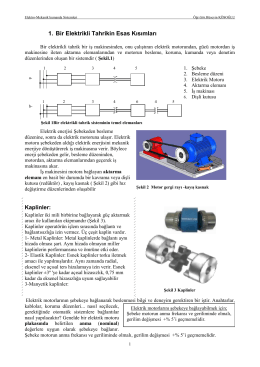
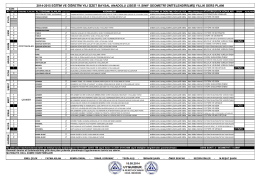
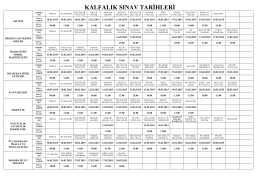
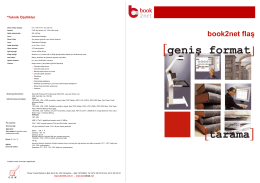
Elektro-Mekanik Kumanda Sistemleri Ders Notu-1
2014-2015 11. sınıf 2 saatlik geometri yıllık plan
Kalfalık Sınav tarihleri 2015 Şubat Dönemi Sınav Tarihleri
book2net flaş
Twido Kitabı - rennovateknik.com
BİLGİ DEPOSU
Millimar.
Çalışma Soruları
REAKTİF KONTROL VE UZAKTAN İZLEME SİSTEMİ
3.Sınıf Soru kitapçığı - Milli Eğitim Bakanlığı
Bilgisayarlar Hakkında Temel Bilgiler
elektrik motorları ve sürücüleri 2 (İndirme : 0)
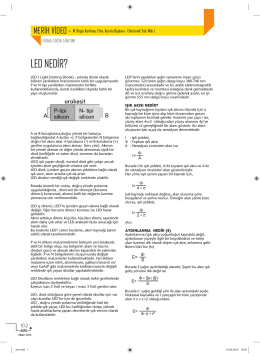
LED NEDİR? - Elektrik Dergisi
Elektrikli Süpürge Fiyat Listesi 2014-1
Taşınmaz ticareti faaliyetinde bulunan şirketlerin