Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
sıemens s7-300 eğitim notları - İÜ
PLC
spis treśœci - E
BLUETOOTH KOMPATIBILITA R-LINK 2 (MM14) Seznam
13 Kasım 2014 - Perşembe 14 Kasım 2014
Son Sınıfı Not Sistemi
Eki: İlgi Yazı
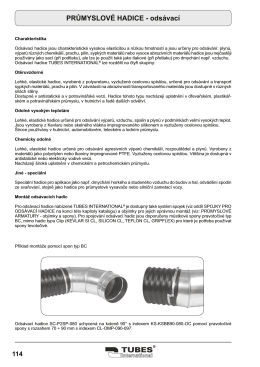
PR MYSLOVÉ HADICE 0 odsávací
Ekonomik Mücadele ve Sendikalar Üzerine
09/2013 - Informator Pielgrzyma
2.Udalosti v živote korytnačky, skok na ľubovoľnú pozíciu
RZUT PARTERU - LastadiaOffice
S7300 Temel Seviye
teknik şartname - Bilecik Şeyh Edebali Üniversitesi İhale Bilgi Sistemi
tcdd işletmesi 3. bölge • aykon inegöl organize sanayi bölgesi
Úvod do termodynamiky (E-publikácia)
Asistan Karnesi - Tıp Fakültesi
Luup - IPL
Návod - Euronics
TBT_4 - Personel Web Sistemi
EKLER
Araç Devrilme Dinamiğinin için Model Öngörülü Kontrol
sağlıkta adres - Başkent Üniversitesi Ankara Hastanesi