Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
DIPLOMOVÁ PRÁCA - Žilinská univerzita
sec vertical h
การวิเคราะห์ระบบควบคุมป้อนกลับด้วย Matlab/Simulink
VÝSLEDKY, RIEŠENIA, NÁVODY 1 MECHANIKA α α
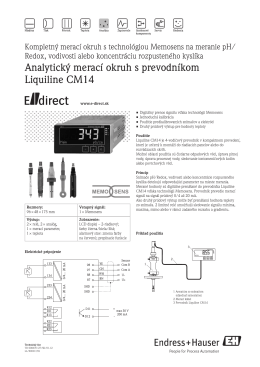
Analytický merací okruh s prevodníkom Liquiline CM14 - E
TC-31 Návod na použitie
NÁVOD P5310, P5311
Tréningové systémy pre techniku pohonov
Skriptá - návody na cvičenia - Katedra teoretickej a priemyselnej
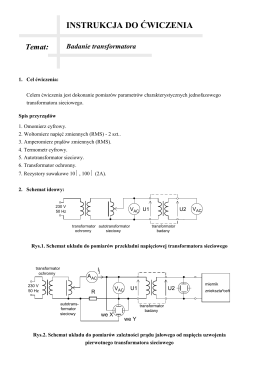
ćwiczenie nr 18
neis_navod.pdf (.pdf)
Základná škola s materskou školou Bolešov 276, 018 53 Bolešov
m - Fyzika Zeme
Február 2013 - Strojárstvo
null
Plán práce školy na školský rok 2013/2014
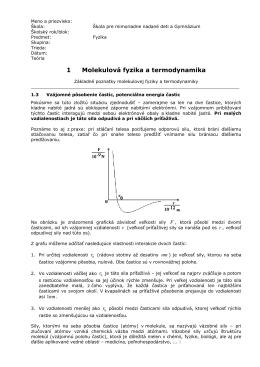
1 REKAPITULÁCIA FYZIKÁLNYCH POZNATKOV
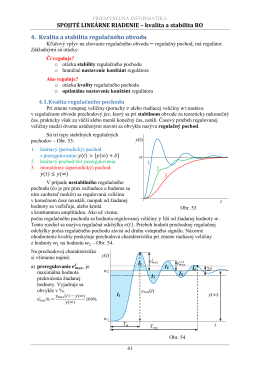
10_Kvalita a stabilita RO
kapitola spinany reluktancny motor.pdf
Dokumenty na stiahnutie
PROFIL SPOLOČNOSTI - Domat Control System
ÚVOD - KEA - Technické meranie
Frekvenčné meniče, ich využitie na pohony