Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Kmitání jednorozměrných lineárních mitání jednorozměrných
here
Wygoda i kompaktowe wymiary to najważniejsze cechy mebli linii
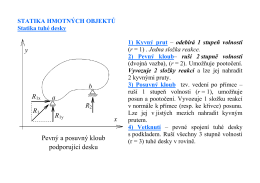
Tíha
ANKARA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ DOKTORA
Informace o instalaci dodávané výrobcem
Nowości - luty - Filia w Jaworowej
Přiložený soubor - Český svaz geodetů a kartografů
Generální zpráva – znovuužití asfaltových směsí a recyklace
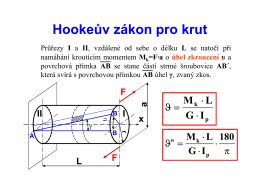
Hookeův zákon pro krut
บทที่5ปริพันธ์ไม่ตรงแบบ
x y a b R1 R2 Pevný a posuvný kloub podporující desku
Půda a voda - Národní konference VENKOV 2015
to get the file
burada - WordPress.com
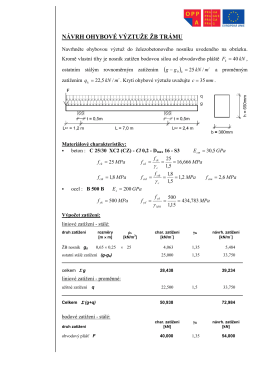
Návrh ohybové výztuže ŽB trámu
Metody a formy práce ve výuce mateřského jazyka
BarDIMM specifikace (PDF)
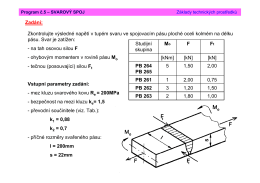
Zadání: Zkontrolujte výsledné napětí v tupém svaru ve spojovacím
Sinyaller ve Sistemler örnek bir soru
Mehmet Akif EZAN – Dokuz Eylül Üniversitesi Isı Transferi DEÜ
Ćwiczenia VIII Fizyka cząstek elementarnych
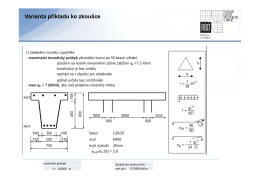
Varianta příkladu ke zkoušce