Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
R - Karadeniz Teknik Üniversitesi
import android.cont - Turkcell Geleceği Yazanlar
sıcak lezzetler yuvası_1_8
Variac Controlled Reactive Power Compensation Application
R - Karadeniz Teknik Üniversitesi
Rad
MOBİL UYGULAMA GELİŞTİRME
Android ile Arduino
4/8-kanal H.264 DVR Kullanım Kılavuzu
T MURLU ORDUSUNDA KULLANILAN CEZA Y NTEMLER
yazı işleri birimi - Öğrenci İşleri Daire Başkanlığı
Sorular - Ati Bilgisayar Kursu
Bluetooth és NFC kommunikáció (+ bemutató
320433.59 KB
AYDINLATMADA LED TEKNOLOJİSİ Nurel KILIÇ
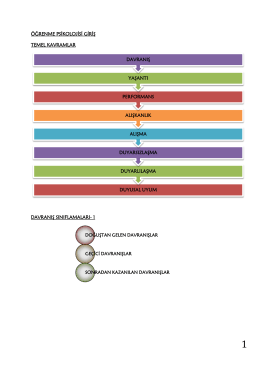
öğrenme psikolojisi giriş temel kavramlar davranış sınıflamaları
Göster - SoruYurdu.com
yetersizlik türleri pdf
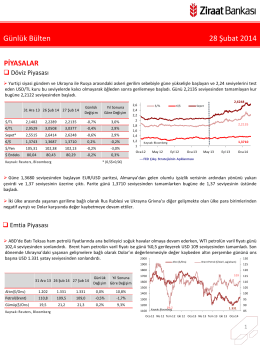
Günlük Bülten 28 Şubat 2014
27 KULÜPLERDEN HABERLER Bölge
Quadcopter Nasıl Yapılır? 3
Denizatı Sınıfı
Mercanlar Sınıfı